{kind=link}
0.0.1 ↑ Kreisbewegung
Bogenlänge: s = \varphi \cdot r;
Mittlere Geschwindigkeit: \overline{v} = \frac{\Delta x}{\Delta t};
Mittlere Winkelgeschwindigkeit: \overline{\omega} = \frac{\Delta \varphi}{\Delta t}; \quad \left[\overline{\omega}\right] = \frac{1}{\mathrm{s}};
Konstante Winkelgeschwindigkeit: \omega = \frac{\Delta \varphi}{\Delta t} = \frac{\varphi - \varphi_0}{t - t_0}; ⇒ \omega = \frac{\varphi}{t};
Umlaufdauer T: \omega = \frac{2\pi}{T}; \quad \left[T\right] = \mathrm{s};
Frequenz f: f = \frac{1}{T}; \quad \left[f\right] = \frac{1}{\mathrm{s}} = \mathrm{Hz};
⇒ \omega = 2 \pi f;
Bewegungsgleichungen:
x(t) = r \cdot \cos \omega{}t;
y(t) = r \cdot \sin \omega{}t;
Bahngeschwindigkeit: v = \frac{\varphi r}{t} = \frac{\omega t r}{t} = \omega r;
Die Bahngeschwindigkeit ist tangential zum Kreis und steht senkrecht zum Ortsvektor \vec v.
Für die Ablenkung aus der geradlinigen Bahn ist (vgl. Trägheitssatz!) eine Kraft nötig. Bei einer Kreisbahn ist diese Kraft zum Kreismittelpunkt hin gerichtet und heißt Zentripetalkraft.
Gleichförmige Bewegung: \left| \vec v \right| ändert sich nicht.
Symbol für die Zentripetalkraft: \vec F_r
Nach Newton: \vec F_r = m \cdot \vec a_r;
Bestimmung der Zentripetalbeschleunigung \vec a_r:
Richtung von \vec a_r: radial nach innen
Betrag von \vec a_r: \frac{\Delta\vec v}{\Delta t}: mittlere Beschleunigung im Zeitintervall \Delta t
\Delta t \to 0 → Momentanbeschleunigung
⇒ \vec a_r = \lim\limits_{\Delta t \to 0} \frac{\Delta\vec v}{\Delta t};
[Abb.]
\vec v' = \vec v + \Delta\vec v;
Wegen ähnlicher Dreiecke folgt: \dfrac{\Delta v}{v} = \dfrac{\overline{PP'}}{r}; ⇒ \Delta v = v \cdot \dfrac{\overline{PP'}}{r}; ⇒ \dfrac{\Delta v}{\Delta t} = \dfrac{v}{\Delta t} \dfrac{\overline{PP'}}{r};
Mit \Delta t \to 0 nähert sich \overline{PP'} der Bogenlänge \Delta s = v \cdot \Delta t an.
⇒ \lim\limits_{\Delta t \to 0} \dfrac{\Delta v}{\Delta t} = \lim\limits_{\Delta t \to 0} \dfrac{v}{\Delta t} \dfrac{\overline{PP'}}{r} "=" \lim\limits_{\Delta t \to 0} \dfrac{v}{r} \dfrac{v \cdot \Delta t}{\Delta t} = \frac{v^2}{r} = \left|\vec a_r\right|;
Ergebnis: Für den Betrag der Zentripetalbeschleunigung bei der gleichförmigen Kreisbewegung gilt: \left|\vec a_r\right| = a_r = \frac{v^2}{r} = \omega^2 r;
Es gilt: a_r \sim r;
Folgerung: Für die Zentripetalkraft F_r gilt daher (nach NEWTONs 2. Gesetz): F_r = m \cdot a_r = m \frac{v^2}{r} = m \omega^2 r mit \omega = \frac{2\pi}{T};
[Versuch: Überprüfung unserer deduktiven Herleitung]
0.0.1.1 ↑ Beispiel: Schiffschaukel (vgl. Buch S. 89)
[Abbildung: Kreis, oben A, links B, unten C]
- a)
In A soll v_A so groß sein, dass ein Gegenstand in der Schaukel nicht herunterfällt (Schwerelosigkeit), d.h. in A wird die Gewichtskraft komplett für die Zentripetalkraft verwendet:
F_{R_A} = F_G; \Rightarrow m\frac{v_A^2}{r} = mg; \Rightarrow v_A = \sqrt{rg};
- b)
Betrag der Geschwindigkeit auf dem Weg von A nach C:
Energieerhaltung ⇒ \left|\vec v\right| nimmt zu.
In C: Nullniveau für E_{\mathrm{pot}}
Energiebilanz in der Höhe h: 2mgr + \frac{1}{2}mv_A^2 = mgh + \frac{1}{2}mv_h^2; \Rightarrow v_h = \sqrt{5gr - 2gh};
Geschwindigkeit in B: v_B = \sqrt{5gr - 2gr} = \sqrt{3gr}; \Rightarrow F_{R_B} = 3mg;
Geschwindigkeit in C: v_C = \sqrt{5gr - 0} = \sqrt{5gr}; \Rightarrow F_{R_C} = 5mg;
0.0.1.2 ↑ Kurvenfahrt
F: Kraft der Straße auf das Auto (Gegenkraft der Normalkraft)
Bei idealer Kuvenüberhöhung liefert \vec F + \vec G eine Kraft zum Mittelpunkt der Kreisbahn: \\ \vec F_r = \vec F + \vec G;
Bei idealer Kurvenüberhöhung gilt:
\tan\alpha = \dfrac{F_r}{G} = \dfrac{m\frac{v^2}{r}}{mg} = \dfrac{v^2}{rg}; (unabhängig von m)
⇒ v = \sqrt{rg \cdot \tan\alpha} ist die optimale Geschwindigkeit für die Kurve.
0.0.1.3 ↑ Radler in der Kurve (ohne Überhöhung)
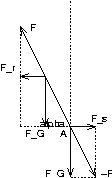
Neigung nach innen um \alpha
\vec F_r: Zentripetalkraft
\vec F_s: Seitliche Kraft
A: Auflagepunkt
\vec F ist die Reactio auf die Kraft des Rades im Auflagepunkt A. Ihre Vertikalkomponente hält F_G das Gleichgewicht.
Die Horizontalkomponente von \vec F ist \vec F_r. Sie hat keine ersichtliche Gegenkraft1 und dient als Zentripetalkraft.
Für den Neigungswinkel \alpha gilt: \\\tan\alpha = \frac{F_r}{F_g} = \frac{v^2}{rg};
In A: F_s muss von der Haftung zwischen Reifen und Fahrbahn aufgebracht werden. Haftkraft F_H \geq F_s = F_r;
Wegen F_H = \mu \cdot F_s folgt für die Haftreibungszahl: \\\mu \cdot F_G \geq F_r; \Rightarrow \mu \geq \frac{F_r}{F_G} = \tan\alpha;
Also sichere Kurvenfahrt, solange \mu > \tan\alpha;
0.0.1.4 ↑ Zwei Probleme
Wie beeinflusst die Erdrotation die Gewichtskraft der Körper auf der Erdoberfläche (am Äquator, in Augsburg (48° n.Br.)) prozentual?
F_r(\alpha) = m\dfrac{v^2}{r} = m\dfrac{v^2}{r\cos\alpha};
F_e(\alpha) = mg - F_R(\alpha) = m\left[g - \dfrac{v^2}{r\cos\alpha}\right];
\dfrac{F_e(\alpha)}{mg} = 1 - \dfrac{v^2}{rg\cos\alpha} = 1 - \dfrac{4\pi^2r^2}{rgT\cos\alpha} = 1 - \dfrac{4\pi^2r}{Tg\cos\alpha};
⇒ Bei 0°: ca. 0,00343%\\ ⇒ Bei 48°: ca. 0,00513%
Jeder Massenpunkt der Erdkugel, der nicht auf der Erdachse liegt, erfährt eine Zentrifugalkraft F_{fl} = m\omega^2R_E\cos\varphi. Sie ist senkrecht zur Erdachse gerichtet. F_{fl} kann in zwei Komponenten zerlegt werden:
Die senkrecht zur Erdoberfläche gerichtete Radialkomponente F_{\mathrm{rad}} -- Sie bewirkt...
Eine tangential zur Erdoberfläche (längs der Meridiane) verlaufende, zum Äquator gerichtete Tangentialkomponente F_{\mathrm{tang}}. Sie hat die Abplattung der Erde mit dem Wülsten am Äquator verursacht. (Die feste Erdkruste "schwimmt" auf einem flüssigen Kern!)